7.8 KiB

ZeroClaw 🦀(Русский)
Zero overhead. Zero compromise. 100% Rust. 100% Agnostic.
🌐 Языки: English · 简体中文 · 日本語 · Русский
Установка в 1 клик | Быстрый старт | Хаб документации | TOC docs
Быстрые маршруты: Справочники · Операции · Диагностика · Безопасность · Аппаратная часть · Вклад и CI
Этот файл — выверенный перевод
README.mdс акцентом на точность и читаемость (не дословный перевод).Технические идентификаторы (команды, ключи конфигурации, API-пути, имена Trait) сохранены на английском.
Последняя синхронизация: 2026-02-18.
О проекте
ZeroClaw — это производительная и расширяемая инфраструктура автономного AI-агента:
- Нативно на Rust, единый бинарник, переносимость между ARM / x86 / RISC-V
- Архитектура на Trait (
Provider,Channel,Tool,Memoryи др.) - Безопасные значения по умолчанию: pairing, явные allowlist, sandbox и scope-ограничения
Почему выбирают ZeroClaw
- Лёгкий runtime по умолчанию: Повседневные CLI-операции и
statusобычно укладываются в несколько МБ памяти. - Оптимизирован для недорогих сред: Подходит для бюджетных плат и небольших cloud-инстансов без тяжёлой runtime-обвязки.
- Быстрый cold start: Архитектура одного Rust-бинарника ускоряет запуск основных команд и daemon-режима.
- Портативная модель деплоя: Единый подход для ARM / x86 / RISC-V и возможность менять providers/channels/tools.
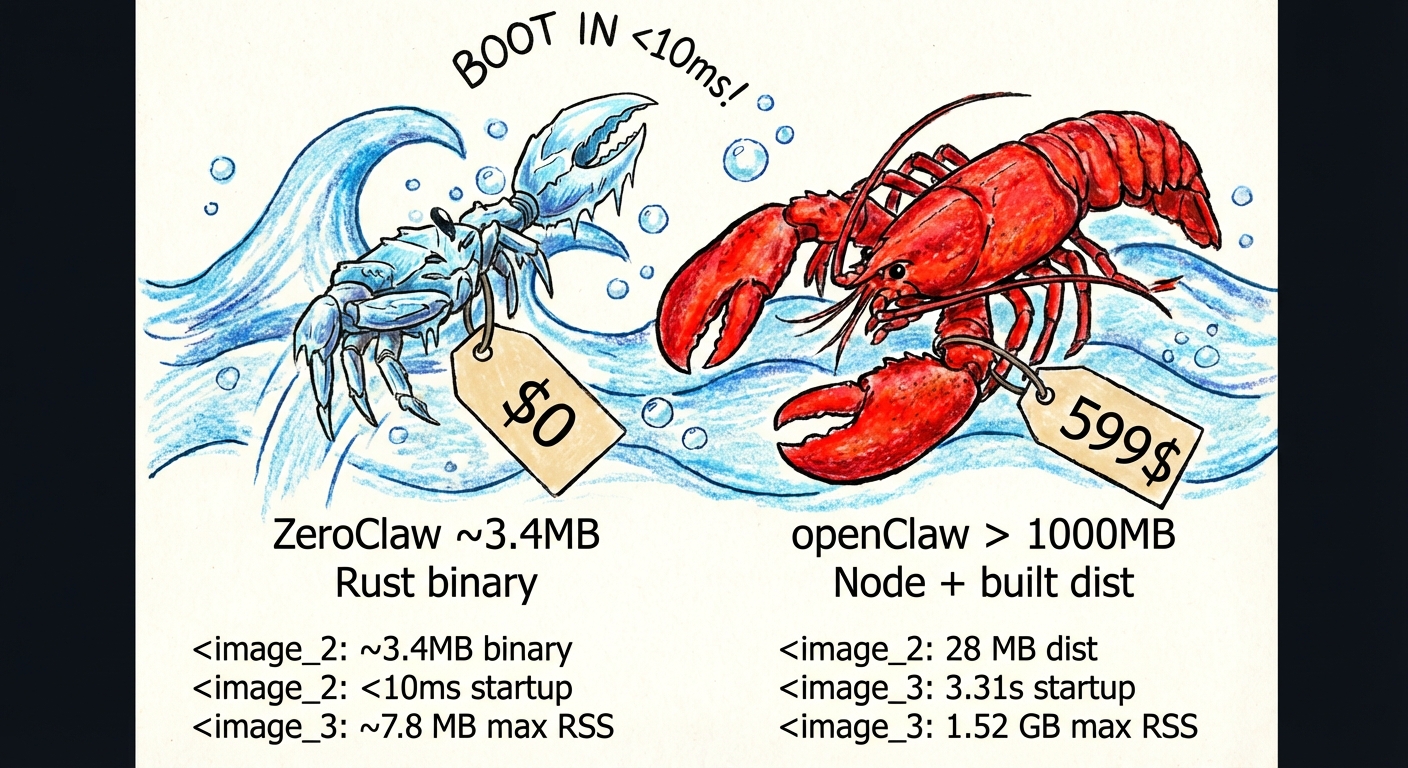
Снимок бенчмарка (ZeroClaw vs OpenClaw, воспроизводимо)
Ниже — быстрый локальный сравнительный срез (macOS arm64, февраль 2026), нормализованный под 0.8GHz edge CPU.
| OpenClaw | NanoBot | PicoClaw | ZeroClaw 🦀 | |
|---|---|---|---|---|
| Язык | TypeScript | Python | Go | Rust |
| RAM | > 1GB | > 100MB | < 10MB | < 5MB |
| Старт (ядро 0.8GHz) | > 500s | > 30s | < 1s | < 10ms |
| Размер бинарника | ~28MB (dist) | N/A (скрипты) | ~8MB | 3.4 MB |
| Стоимость | Mac Mini $599 | Linux SBC ~$50 | Linux-плата $10 | Любое железо за $10 |
Примечание: значения в таблице носят ориентировочный характер и зависят от среды. OpenClaw работает поверх Node.js (заметный runtime-overhead), NanoBot зависит от Python runtime, PicoClaw и ZeroClaw — статические бинарники.
Локально воспроизводимое измерение
Метрики могут меняться вместе с кодом и toolchain, поэтому проверяйте результаты в своей среде:
cargo build --release
ls -lh target/release/zeroclaw
/usr/bin/time -l target/release/zeroclaw --help
/usr/bin/time -l target/release/zeroclaw status
Текущие примерные значения из README (macOS arm64, 2026-02-18):
- Размер release-бинарника:
8.8M zeroclaw --help: ~0.02s, пик памяти ~3.9MBzeroclaw status: ~0.01s, пик памяти ~4.1MB
Установка в 1 клик
git clone https://github.com/zeroclaw-labs/zeroclaw.git
cd zeroclaw
./bootstrap.sh
Для полной инициализации окружения: ./bootstrap.sh --install-system-deps --install-rust (для системных пакетов может потребоваться sudo).
Подробности: docs/one-click-bootstrap.md.
Быстрый старт
git clone https://github.com/zeroclaw-labs/zeroclaw.git
cd zeroclaw
cargo build --release --locked
cargo install --path . --force --locked
zeroclaw onboard --api-key sk-... --provider openrouter
zeroclaw onboard --interactive
zeroclaw agent -m "Hello, ZeroClaw!"
# default: 127.0.0.1:3000
zeroclaw gateway
zeroclaw daemon
Важные security-дефолты
- Gateway по умолчанию:
127.0.0.1:3000 - Pairing обязателен по умолчанию:
require_pairing = true - Публичный bind запрещён по умолчанию:
allow_public_bind = false - Семантика allowlist каналов:
[]=> deny-by-default["*"]=> allow all (используйте осознанно)
Пример конфигурации
api_key = "sk-..."
default_provider = "openrouter"
default_model = "anthropic/claude-sonnet-4-6"
default_temperature = 0.7
[memory]
backend = "sqlite"
auto_save = true
embedding_provider = "none"
[gateway]
host = "127.0.0.1"
port = 3000
require_pairing = true
allow_public_bind = false
Навигация по документации
- Хаб документации (English):
docs/README.md - Единый TOC docs:
docs/SUMMARY.md - Хаб документации (Русский):
docs/README.ru.md - Справочник команд:
docs/commands-reference.md - Справочник конфигурации:
docs/config-reference.md - Справочник providers:
docs/providers-reference.md - Справочник channels:
docs/channels-reference.md - Операционный runbook:
docs/operations-runbook.md - Устранение неполадок:
docs/troubleshooting.md - Инвентарь и классификация docs:
docs/docs-inventory.md - Снимок triage проекта:
docs/project-triage-snapshot-2026-02-18.md
Вклад и лицензия
- Contribution guide:
CONTRIBUTING.md - PR workflow:
docs/pr-workflow.md - Reviewer playbook:
docs/reviewer-playbook.md - License: MIT (
LICENSE,NOTICE)
Для полной и исчерпывающей информации (архитектура, все команды, API, разработка) используйте основной английский документ: README.md.